Im Zuge des steigenden technologischen Fortschritts werden immer mehr Technologien zur Unterstützung des Menschen in verschiedenen Lebensbereichen entwickelt und eingesetzt, z. B. in Form von Prothesen, AR/VR-Applikation oder Exoskeletten. Dabei müssen die jeweiligen Systeme stets auf die Bedürfnisse des Benutzers angepasst werden, um eine individuelle Unterstützung zu gewährleisten. Bei der Kraftunterstützung durch Exoskelette für stark beanspruchte Körperregionen besteht die Herausforderung u. a. darin, die spezielle Bewegungscharakteristik mit teils hohen Bewegungsgeschwindigkeiten und -beschleunigungen durch das System abzubilden sowie die Unterstützungsfunktion an sich zu gestalten. Erschwerend wird die Entwicklung durch die Weichteile des menschlichen Körpers sowie komplex aufgebaute Gelenke mit kombinierten Freiheitsgraden beeinflusst.
Die Anforderung bei der Ausgestaltung der morphologischen Grundstruktur des Systems besteht in der Realisierung eines leichten, weichen und körpernahen Exosuits mit hohem Tragekomfort und einer Kombinierbarkeit mit der Arbeitskleidung. Neben dieser textilen Grundstruktur wird die verwendete Aktuatorik bisher häufig aufgrund geeigneter mechanischer Parameter aus den klassischen Antrieben der Robotik ausgewählt. Auf den Menschen und seine Bewegungen angepasste Aktuatoren fehlen bislang.
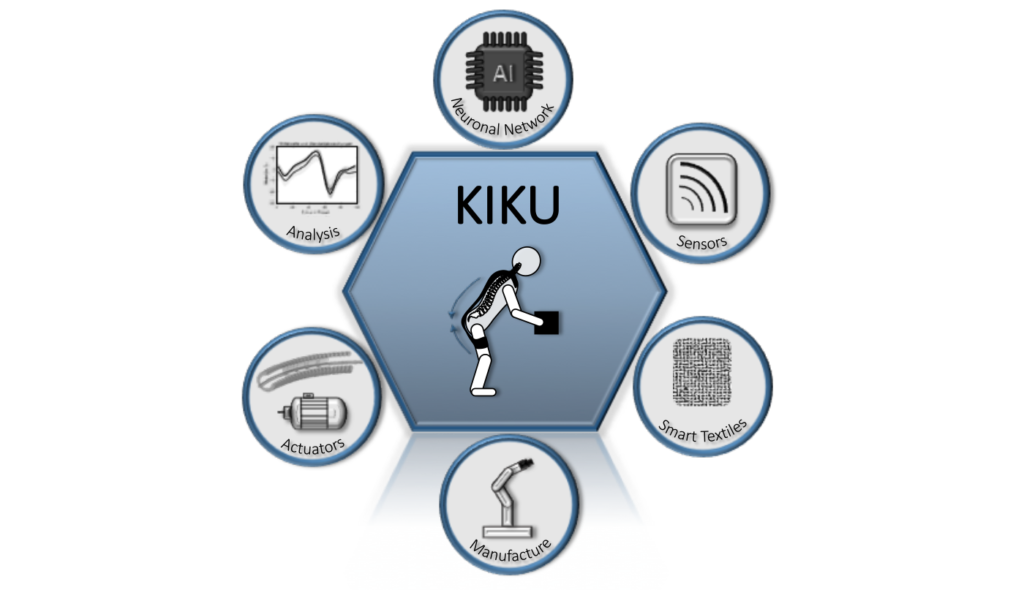
Vor dem beschriebenen Hintergrund wird im Vorhaben KIKU die Weiterentwicklung eines neuartigen, biegsamen elektrischen Linearmotors samt grundlegender Methodik zur Auslegung sowie die exemplarische Anwendung in einem neuartigen Exoskelett zur Unterstützung des Rückens bei Pflegetätigkeiten adressiert. Vier Ebenen stehen hierbei im Fokus:
- Erarbeitung von relevanten Grundlagen und Methoden zur Auslegung und Integration biegsamer Linearantriebe, der Evaluation dieser und der Gestaltung von Exoskeletten mit entsprechenden Antrieben.
- Entwicklung neuartiger Linearantriebe für zukünftige Anwendungsfelder.
- Konzeption und Umsetzung eines textilbasierten Exoskelettes für die Anwendung in der Pflege.
- Exemplarische Integration in ein neuartiges Exoskelett und Evaluation der Teilkomponenten und des Gesamtsystems.
Die wissenschaftliche und technische Umsetzung erfolgt durch ein interdisziplinäres Team in Zusammenarbeit mit Partnern aus Wissenschaft, industriellen Systemherstellern und Endnutzern. Hierdurch kann die Entwicklung einer neuartigen Technologie für die Aktuierung von speziellen technischen Systemen mit direkter Interaktion zum Menschen entwickelt und exemplarisch an einem Exoskelett umgesetzt werden. Schlussendlich profitieren Nutzerinnen und Nutzer verschiedener Branchen und Anwendungsfelder von den Entwicklungen, indem sie durch entsprechende Technologien besser bei der Ausführung von Tätigkeiten/Aktivitäten unterstützt werden.
Projektstart/-laufzeit: 01.01.2021 bis 31.12.2023
Projektleitung
Univ.-Prof. Dr.-Ing. Christian Kreischer
Helmut-Schmidt-Universität |
Universität der Bundeswehr Hamburg
Professur für Elektrische Maschinen und Antriebssysteme
Telefon: +49 40 6541-2060
E-Mail: [email protected]
www.hsu-hh.de/ema
Letzte Änderung: 17. Mai 2021