In the process of increasing technological progress, more and more technologies are being developed and used to support people in various areas of life, e.g. in the form of prostheses, AR/VR application or exoskeletons. In the process, the respective systems must always be adapted to the needs of the user in order to ensure individual support. In the case of power support through exoskeletons for highly stressed body regions, the challenge is, among other things, to map the special movement characteristics with sometimes high movement speeds and accelerations through the system as well as to design the support function itself. The development is made more difficult by the soft tissues of the human body and complex joints with combined degrees of freedom.
The requirement in designing the basic morphological structure of the system is to realise a light, soft and body-hugging exosuit with high wearing comfort and combinability with work clothing. In addition to this basic textile structure, the actuator technology used has so far often been selected on the basis of suitable mechanical parameters from the classic drives of robotics. Actuators adapted to humans and their movements have been lacking up to now.
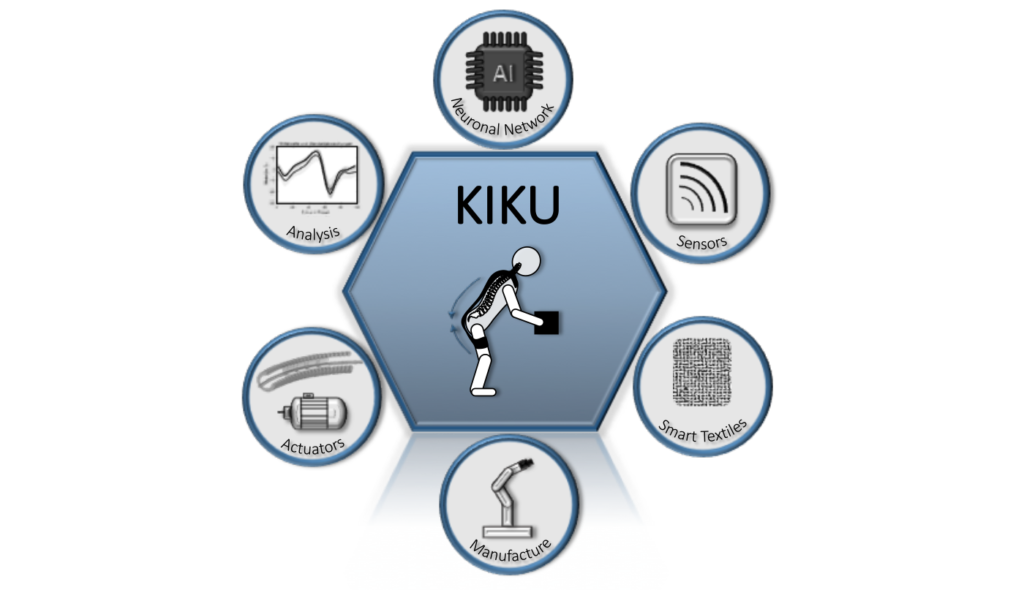
Against the background described above, the KIKU project addresses the further development of a new type of flexible electric linear motor, including a basic design methodology and exemplary application in a new type of exoskeleton to support the back during care activities. The focus is on four levels:
- Development of relevant principles and methods for the design and integration of flexible linear drives, the evaluation of these and the design of exoskeletons with corresponding drives.
- Development of new types of linear drives for future fields of application.
- Design and implementation of a textile-based exoskeleton for use in care.
- Exemplary integration into a novel exoskeleton and evaluation of the subcomponents and the overall system.
The scientific and technical implementation is carried out by an interdisciplinary team in cooperation with partners from science, industrial system manufacturers and end users. In this way, the development of a new technology for the actuation of special technical systems with direct interaction with humans can be developed and implemented using an exoskeleton as an example. Ultimately, users from various sectors and fields of application will benefit from the developments, as they will be better supported in carrying out tasks/activities through corresponding technologies.
Project start/term: 01.01.2021 to 31.12.2023
Project management
Univ.-Prof. Dr.-Ing. Christian Kreischer
Helmut-Schmidt-Universität |
University of the Federal Armed Forces Hamburg
Professorship for Electrical Machines and Drive Systems
Telefon: +49 40 6541-2060
E-Mail: [email protected]
www.hsu-hh.de/ema
Letzte Änderung: 21. July 2021