
Das folgende Video zeigt eine Beispielanwendung zur Erkundung und zweidimensionalen Kartographierung eines unbekannten Innenraums. Ein Quadrotor bewegt sich dort mit konstanter Höhe und Geschwindigkeit autonom durch einen ihm unbekannten Raum. Die Messwertaufnahme erfolgt über einen Laserscanner. Auf Basis der so gewonnen Daten navigiert der Roboter und führt mit Hilfe eines speziell entwickelten SLAM-Algorithmus die Kartographierung durch. Die Abkürzung SLAM steht dabei für Simultaneous Localization And Mapping. Während der Mission, bei der die Umgebungskarte sequenziell aufgebaut wird, ist keine Verbindung zu einer Bodenstation erforderlich, da alle benötigten Algorithmen an Bord des Quadrotors berechnet werden. Somit agiert der Roboter hier vollständig autonom. Die Person, die zu Beginn kurz im Bild ist kann aus Sicherheitsgründen allerdings jederzeit mit dem Handsender die Kontrolle übernehmen. Das Szenario wurde in einer Sporthalle mit Hilfe von Stellwänden realisiert.
Im weiteren Verlauf dieser Seite sind die einzelnen Schritte der im Video dargestellten Anwendung näher erläutert.
Messwertaufnahme und Auswertung
Am Beispiel eines Laserscanners, der auch in dem Video als Hauptinformationsquelle für die Navigation und Kartographierung verwendet wurde, wird hier kurz das Messprinzip erläutert.
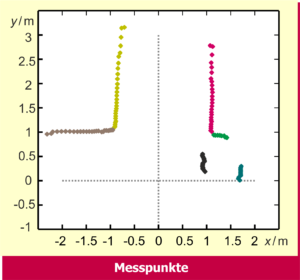
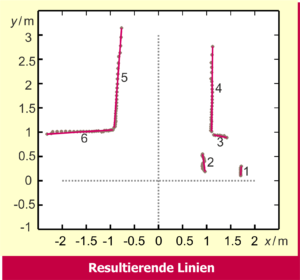
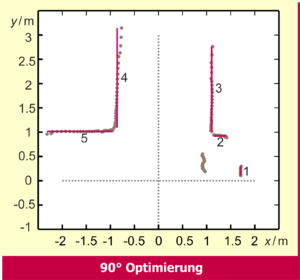
Den verwendeten Laserentfernungsmesser zeigt das erste Bild. Er hat eine Reichweite von 30m und einen Öffnungswinkel von 270°. Mit der eingestellten Schrittweite von 1° wird jeweils die Entfernung bis zu einem Hindernis durch die Reflektion des Lichtstrahls gemessen. Ein mögliches Ergebnis zeigen die farbig markierten Punkte im zweiten Bild. Die farblich markierten Bereiche werden dann, wie im dritten Bild gezeigt, jeweils durch eine Linie dargestellt. Da man sich bei der Beispielanwendung innerhalb von Gebäuden befindet, ist die Umgebung meist rechtwinklig strukturiert. Die ermittelten Linien werden daher auf ein solches Raster optimiert. Das Ergebnis der Messung, welches die Grundlage für die Kartenerstellung bildet, zeigt das vierte Bild.

Kartenerstellung
Die Lösung des Problems, sich in einer unbekannten Umgebung zu orientieren und zeitgleich die erhaltenen Informationen in einer Karte zu speichern, ist in der Literatur unter dem Begriff SLAM (Simultaneous Localization And Mapping) bekannt. Die Wahl aus den bestehenden Verfahren fiel wegen des vergleichsweise geringen Speicherbedarfs und Rechenaufwands auf ein Verfahren, das auf Linien basiert. Dessen Grundidee wurde 2007 von Choi/Lee veröffentlicht. Es wurde dahin gehend optimiert, dass es bei einem autonomen Flugroboter zur Anwendung kommen kann.
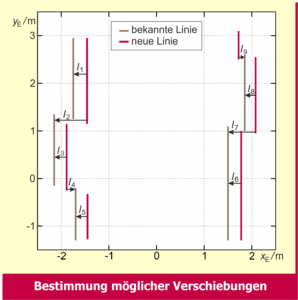
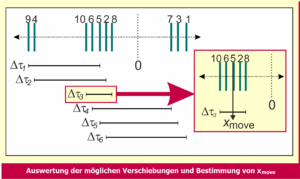
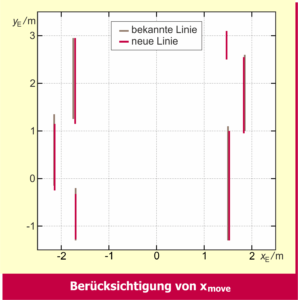
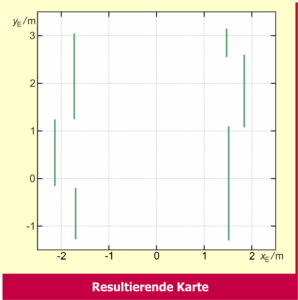
Der wichtigste Schritt ist die Eingliederung der aus der Messung ermittelten Linien in eine Karte. Ein Roboter benötigt in der Regel mehrere Messungen an verschiedenen Positionen, um eine vollständige Karte des Areals zu bekommen. Um die aus der jeweiligen Messung ermittelten Linien richtig in die Karte einzutragen muss man daher Kenntnis über die Position des Roboters haben. Diese wird hier bei der aktuellen Messung immer relativ zu der Position der vorhergehenden Messung bestimmt. Dieses wird durch den Vergleich der beiden Messergebnisse erreicht. Ein Beispiel für die Bestimmung der Verschiebung in eine Richtung zeigen die vier Bilder. Aus allen möglichen Verschiebungen, die links und in der Mitte jeweils von 1 bis 9 nummeriert sind, wird die wahrscheinlichste Verschiebung xmove ermittelt. Mit dieser Verschiebung kommen die Linien dann fast zur Deckung. Das letzte Bild zeigt die resultierende Karte für das hier gewählte Beispiel.
Navigation
Bei Erkundungen von unbekannten urbanen Gelände oder Innenräumen kann eine Funkverbindung zu einem Leitstand nicht immer sichergestellt werden. Der Roboter muss daher in der Lage sein, sich selbstständig und systematisch durch das zu untersuchende Areal zu bewegen. Von einer Vielzahl möglicher Bewegungsstrategien werden hier zwei genauer vorgestellt, die je nach Art der Mission zum Einsatz kommen.
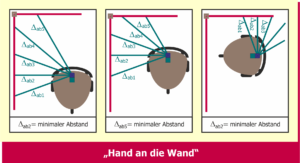
Die sicherste Navigationsstrategie um ein unbekanntes Areal, das für den Roboter wie ein Labyrinth darstellt, zu durchqueren ist, zu Beginn eine Hand an die Wand zu legen. Danach läuft man so durch das Labyrinth, dass diese Hand durchgängig Kontakt zur Wand hat. Da ein Labyrinth bis auf Ein- und Ausgang in sich geschlossen ist, erreicht man so sicher den Ausgang. Da mobile Roboter in der Regel nicht über Hände verfügen, muss diese Strategie so umgesetzt werden, dass der verwendete Roboter sie auch anwenden kann. Für den Roboter bedeutet dies immer einen konstanten Abstand zu einer Wand zu halten. Die Wand muss für den Roboter dabei immer auf der gleichen Seite sein. Im ersten Bild ist die Strategie, welche auch im obigen Video eingesetzt wurde, am Beispiel einer linken Wand und eines Laserentfernungsmessers dargestellt.
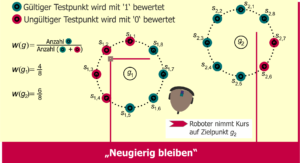
Eine alternative ist eine Strategie, die den Fokus auf die Einsatzzeit eines Roboters legt. Diese ist im Allgemeinen durch die Akkuleistung begrenzt. Es ist somit sinnvoll in kürzester Zeit möglichst viele Daten über ein unbekanntes Gebäude zu sammeln. Daher fährt der Roboter bei dieser Strategie immer dorthin, wo der größte Informationsgewinn zu erwarten ist. Während der Roboter den unbekannten Raum durchquert speichert er die gesammelten Informationen in einer Karte. Dies geschieht beispielsweise nach dem Schema, das auf der Seite Kartenerstellung dargestellt ist. Auf Basis dieser Karte wählt der Roboter bei diesem Verfahren sein Fahrziel aus. Die Auswahl eines solchen Ziels ist schematisch im zweiten Bild dargestellt.
Letzte Änderung: 12. Februar 2018