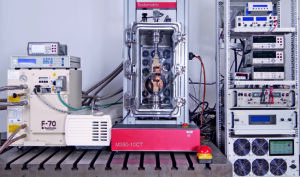
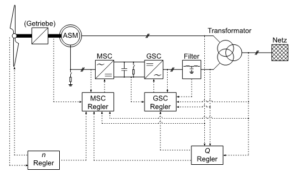
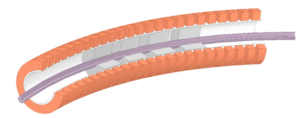
Forschungsprojekte KIKU: Antriebssysteme für Unterstützungssysteme Reichweitenprädiktion in der Elektromobilität Charakterisierung von Hochtemperatur-Supraleitern mit Hilfe eines multiphysikalischen Prüfstandes Hochpolige doppelt gespeiste Asynchronmaschine (DGASM) Kompakte Faserkeramik basierte Röntgenröhre für mobile Computertomographen Entwicklung einer mobilen Prüfeinrichtung Biegeflexibler Linearaktuator Mit mehrphasigem Wechselstrom angetriebene Schienenbeschleuniger KIROSKI-gestützte robotische Systeme im Einsatz für die Gesundheitsbranche unter Berücksichtigung der DIN 13485 und ISO/TS 15066:2016 – kollaborative Roboter HSU Letzte Änderung: 20. November 2025