
As part of the research project „Bendable Linear Actuator“ an innovative drive for Soft Robotics applications is developed. The actuator is build up as a tubular permanent-magnet linear motor. The main goal of the project is to generate a preferably light-weighted and bendable system in order to make completely new design options possible for support system operating close to the human body such as soft exoskeletons.
Central aspects:
- Method development
- Analytical and numerical multi-physical analysis of direct electrical drives
- Construction and Installation of a test bench for the metrological analysis of actuator prototypes
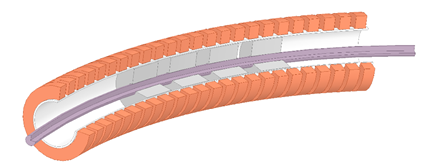
sliding layer (white) and coils (orange)

Letzte Änderung: 5. January 2021