
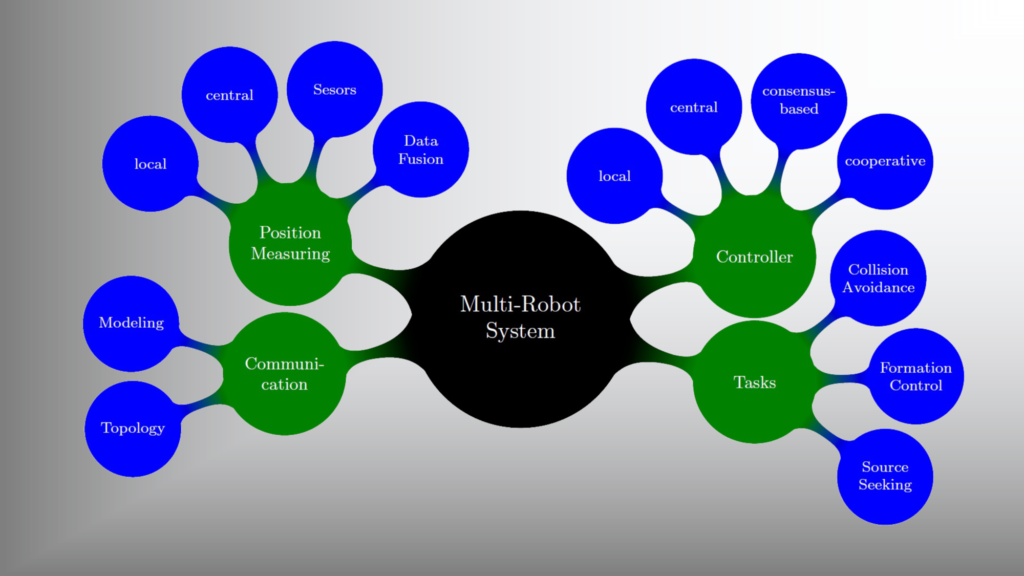
Robots can be used as a group to accomplish difficult, dangerous or time-consuming tasks. There are different aspects of research interest regarding multi-robot systems. This project focuses on dynamic stability and performance of different architectures of homogeneous robot groups. The comparison factors include, but are not limited to communication topologies, measurement systems, control algorithms, navigation schemes and handling of source seeking. Source seeking requires the robots to move towards the extremum of a spatial scalar field.
Multi-Robot groups with such complexity have potential applications in monitoring and exploration scenarios in many fields like logistics, humanitarian missions and maintenance. The investigation of dynamic behavior includes the modeling of all relevant parts in order to perform simulations. The simulations are afterwards verified by experiments on omnidirectional moving robots which use mapping and lidar sensors for position estimation.
The project is motivated by members of our institute and is not supported by external research funds. If you would like to be part of this exciting development process or learn more about this project, feel free to contact Marcus Dorau
Letzte Änderung: 14. April 2022