
An der Professur für Regelungstechnik gibt es zahlreiche Forschungsprojekte, die inhaltlich ein breites Spektrum abdecken. Im weiteren Verlauf dieser Seite alle einzeln aufgeführt und mit entsprechend weitergehenden Informationen und Kontaktpersonen verlinkt.
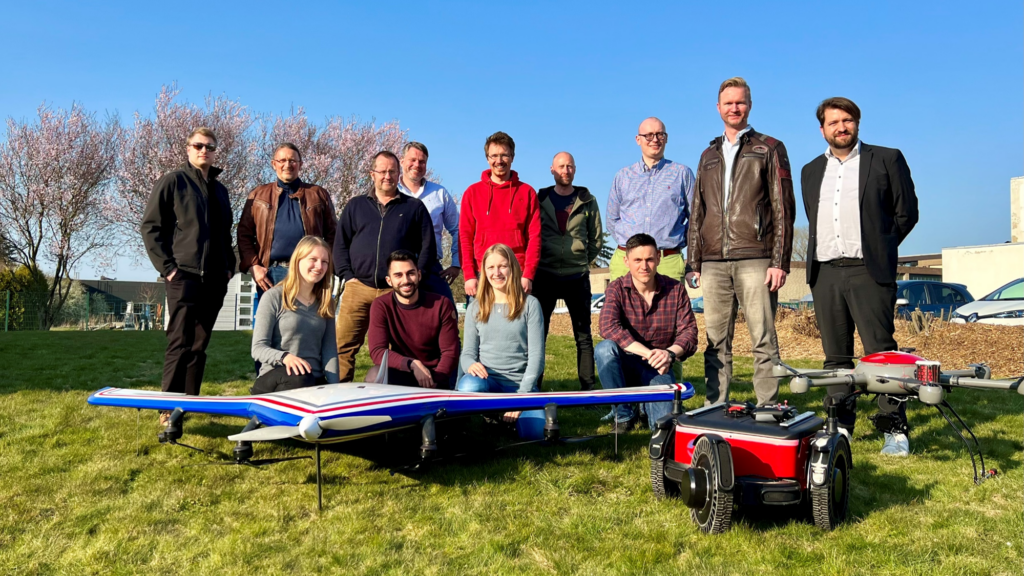
Der Forschungsschwerpunkt der mobilen Roboter vorwiegend zu Lande und in der Luft wird bei einem Blick auf die laufenden Projekte durch eine signifikante Anzahl von teils eigen- und fremdfinanzierten Vorhaben deutlich.
In fast allen Bereichen ist unsere Forschung anwendungsorientiert. Unsere hervorragende Laborausstattung dient dabei als komfortable Basis zur Bearbeitung der Projekte. Neben einer Indoor Testfläche für fahrende und fliegende Systeme, welche die Positionserfassung durch ein Motion-Capture System erlaubt, verfügen wir auch über zahlreiche typische Sensoren im Bereich der mobilen Roboter, wie zum Beispiel 2D und 3D Lasermesssysteme.
Zudem verfügt die Professur über einen 5kW Brennstoffzellenprüfstand, der für die Entwicklung von Betriebsstrategien für Polymer-Elektrolyt-Membran (PEM) Brennstoffzellen und integrierten PEM-Brennstoffzellensystemen für den mobilen und stationären Einsatz verwendet wird.
Sie haben Fragen zu laufenden Projekten oder Interesse mit uns ein neues zu starten? Sprechen sie uns gern an!
Laufende Forschungsprojekte

Ziel des Projekts ist die Automatisierung eines elektromechanischen Flipperautomaten durch Reinforcement Learning. Es sollen verschiedene Strategien zur Ansteuerung der Flipper im Hinblick auf die Spieldauer und den Punktgewinn zu untersucht werden.

Ziel des Projekts „Digitalisierte, rechtssichere und emissionsarme flugmobile Inspektion und Netzdatenerfassung mit automatisierten Drohnen“ (DNeD) ist die Erforschung und Erprobung eines UAS zum automatisierten Absetzen eines Sensors zur Erfassung elektrischer Größen auf einer Freileitung.
Drehmomentunterbrechnungsfreies Schaltgetriege
Im Rahmen der Optimierung des Antriebsstranges von Drohnen wurde ein neuartiges Getriebe erfunden, welches auch in Personen- und Lastkraftwagen seine Anwendung finden kann. Die Besonderheit des Getriebes ist das drehmomentunterbrechnungsfreie Schalten zwischen mindestens zwei Gängen.

Mit dem Verbundvorhaben KI-Inspektionsdrohne wird das Ziel verfolgt, ein gesamtheitliches System eines UAS zur Schadensdetektion und -bewertung von äußeren Strukturen zu entwerfen. Als Anwendungsbeispiel in diesem Kooperationsprojekt dient ein Verkehrsflugzeug, bei dem ein Blitzschlag erkannt werden soll.

Ziel des Projekts „Zustandserfassung von Infrastrukturbauwerken aus Stahl mittels multivariater Inspektionssysteme und Drohnen“ ist die Methodenentwicklung und Erprobung eines automatisierten multivariaten Inspektionssystems für Infrastrukturbauwerke aus Stahl.

Dieses Projekt beschäftigt sich mit der dynamischen Stabilität und Leistungsfähigkeit verschiedener Architekturen von homogenen Multi-Robotersystemen. Die zu berücksichtigen Faktoren sind dabei unter anderem die Kommunikationstopologie, Messeinrichtungen, Quellfindung Regel- und Navigationsalgorithmen.

PEM-Brennstoffzellenbetriebenes UAS
Das Projekt untersucht Vorteile und Machbarkeit eines mit einem Polymer Electrolyte Membrane (PEM) Brennstoffzellenbetriebenen Unmanned Aerial Systems (UAS) und daraus abzuleitende Anwendungen.
Das Projekt „Rechtskonforme IT-Konzepte und -Lösungen für Verbünde autonomer Land-, Wasser- und Luftfahrzeuge“ soll Fahrzeugverbünde unterschiedlicher Modalität (Land, Wasser, Luft) in die Lage versetzen autonom Missionen in Echtzeit zu erfüllen.
Das neuentwicklte eines Kamera-/Sensor-Systems (SFU Swarm-Flight-Unit) dient zur Erkennung, Klassifizierung und Abstandsbestimmung von Drohnen im dreidimensionalen Raum. Zur Validierung und Weiterentwicklung dieses Systems wurde ein eigens konstruierter Prüfstand aufgebaut.

Teleoperiertes Fahren im Konvoi
Für Streitkräfte weltweit ist der unbemannte bzw. teilbemannte Materialtransport ein zukunftsträchtiges Thema. Hierfür gilt es zu erfassen und zu evaluieren, wie Fahrzeuge mit unterschiedlichen Eigenschaften in einem Konvoi kooperieren können. Ziel ist es, ein robustes Steuerungssystem für teleoperiertes Fahren im heterogenen Konvoi zu entwickeln.
Professur ♦ Team ♦ Forschung ♦ Lehre
Letzte Änderung: 2. November 2022